Принцип работы системы AVL
Необходимость оперативного получения навигационной информации привела к формированию обширной комплексной прикладной области транспортно-диспетчерских информационных технологий. Главными потребителями таких услуг стали автомобильные, железнодорожные и морские виды транспорта. Навигационная информация представляет несомненный интерес для инкассаторских служб банков, подразделений МВД, служб безопасности, государственных и коммерческих предприятий, мобильных подразделений прочих организаций, занимающихся перевозками ценных либо опасных грузов.
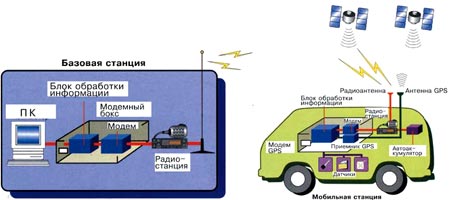
Принцип работы таких систем состоит в следующем. Навигационная антенна и миниатюрный приемник, установленные на автомобиле, принимают и обрабатывают сигналы глобальной спутниковой навигационной системы. По радиоканалу навигационные параметры передаются на диспетчеркий пункт, где на экране размещена электронная карта местности. На ней в автоматическом режиме отображается оперативная обстановка, поэтому дежурный всегда знает, где и в каком состоянии находятся его автомобили. Информация о состоянии транспортных средств снимается с телесигнализационных датчиков, установленных на важнейших узлах машин. Работа с картой полностью автоматизирована: можно на компьютере выделить несколько окон и в каждом организовать слежение за одной, несколькими или всеми машинами. Программа работы с картой сама выбирает необходимый масштаб, переходит с листа на лист и т.п. Кроме картографического терминала, у диспетчера имеется текстовый, на котором в виде таблицы отображается необходимая информация: номер машины, название улицы движения, скорость, расстояние до перекрестка и другие данные. Вся информация записывается в архив и, при необходимости, последовательность событий и действий персонала может быть восстановлена.
Этап I (прием GPS-информации и передача ее на главный диспетчерский центр)
На каждом пользовательском транспортном средстве устанавливается мобильный блок модема с GPS приемником, который обеспечивает прием GPS-информации со спутников и ее обработку. При подключении данного блока к мобильной радиостанции посредством интерфейсного кабеля обеспечивается передача обработанной GPS-информации по линиям используемой транкинговой либо другой системы связи на главный диспетчерский центр.
Этап II (прие м GPS-информации на главном диспетчерском центре и передача ее на РС главного диспетчерского центра)
На главном диспетчерском центре радиостанция обеспечивает прием обработанной GPS-информации и при подключении его посредством интерфейсного кабеля к базовому блоку модема с GPS-приемником осуществляет передачу принятой информации на ПК главного диспетчерского центра, на котором установлено соответствующее программное обеспечение.
Этап III (предоставление услуг пользователям системы AVL)
Пользователь системы AVL, имея в наличие ПК с необходимым программным обеспечением, и подключившись к главному диспетчерскому центру (посредством используемой сети передачи данных -локальной, глобальной или Internet), может воспользоваться теми услугами, которые определил для него провайдер системы AVL на главном диспетчерском центре.
На практике обычна ситуация, когда организации требуется контроль за перемещением своих транспортных средств в пределах города, страны или за границей, причем не обязательно в реальном времени. В то же время возможностей и необходимости в развертывании собственной системы радиосвязи, использовании услуг оператора мобильной связи или AVL-провайдера у нее может не быть. В данном случае лучшим решением является использование логера - миниатюрного и относительно недорогого устройства, устанавливаемого совместно с GPS-приемником на транспортных средствах. Оно, по сути, выполняет роль применяемых в авиации "черных ящиков", фиксируя маршрут перемещения автомобиля и (опционально) параметры его состояния от любых подключенных датчиков. Информация о местоположении транспортного средства, поступающая от GPS-приемника в течение пребывания на маршруте, записывается логером в цифровом виде на съемную Chip-карту и считывается с нее в диспетчерском пункте или офисе.